📌 原文信息
- 原文:Height MapとNormal Mapの相互変換 — Monolith Soft TECH BLOG
- 作者:廣瀬(Monolith Soft 技术美术,主要负责特效相关业务)
- 发布日期:2026.04.14
- 标签:Python / 中级以上 / 数学
以下为 1:1 忠实翻译。文末附有译者的延伸讨论。
前言
大家好,我是 Monolith Soft 的技术美术(TA)廣瀬。这次我想解说 CG 中常用的 Height Map 和 Normal Map 之间的相互转换方法。
首先,我会解说从 Height Map 创建 Normal Map 的方法。Normal Map 只需通过简单的计算即可创建。
接下来,我会解说从 Normal Map 创建 Height Map 的方法。由于从 Normal Map 创建 Height Map 是一个困难的问题,因此已有多种方法被提出。
本文将解说以下几种方法:
- 线积分
- 泊松方程
- 最小化问题
对于上述各方法,我也附上了使用 NumPy 和 SciPy 的实现代码。
Height Map → Normal Map
验证使用的 Height Map:
File:Approximate Earth Heigh Map.png - Wikimedia Commons
{kind=link}
首先解说从 Height Map 创建 Normal Map 的方法。
请注意,Normal Map 会因坐标系的取法不同而导致正负方向相反(即常说的 OpenGL 格式与 DirectX 格式)。
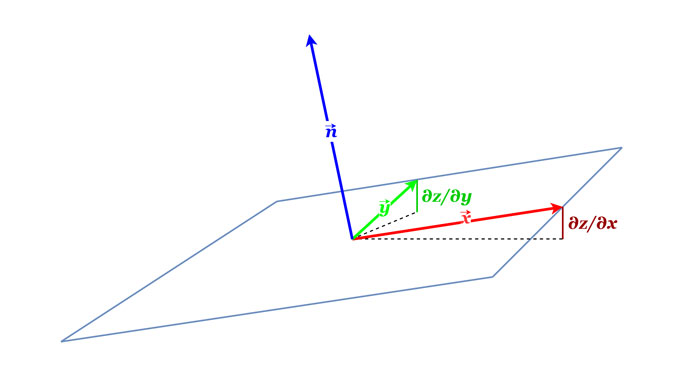
将 Height Map 设为 z(x,y),Normal Map 设为三维单位向量 n(x,y)。
对 Height Map z(x,y) 在 x 轴和 y 轴方向进行偏微分。这里使用 z(x,y) 的中心差分:
$$ \frac{\partial z}{\partial x} = \frac{z(x+1,y) - z(x-1,y)}{2\Delta x}, \quad \frac{\partial z}{\partial y} = \frac{z(x,y+1) - z(x,y-1)}{2\Delta y}. \quad (1) $$
根据式 (1) 的偏微分值,创建 x-z 轴方向的向量 x(x,y) 和 y-z 轴方向的向量 y(x,y):
$$ \vec{x}(x,y) = (\Delta x, 0, \frac{\partial z}{\partial x}), \quad \vec{y}(x,y) = (0, \Delta y, \frac{\partial z}{\partial y}). \quad (2) $$
对式 (2) 的两个向量取外积并归一化,即为 Normal Map 的向量 n(x,y):
$$ \vec{n}(x,y) = \frac{\vec{x}(x,y) \times \vec{y}(x,y)}{\| \vec{x}(x,y) \times \vec{y}(x,y) \|}. \quad (3) $$
由于单位向量 n(x,y) 的各分量范围在 -1 到 1 之间,因此在保存为纹理时,通常对各分量执行 * 0.5 + 0.5 运算,将值重映射到 0 到 1 的范围。
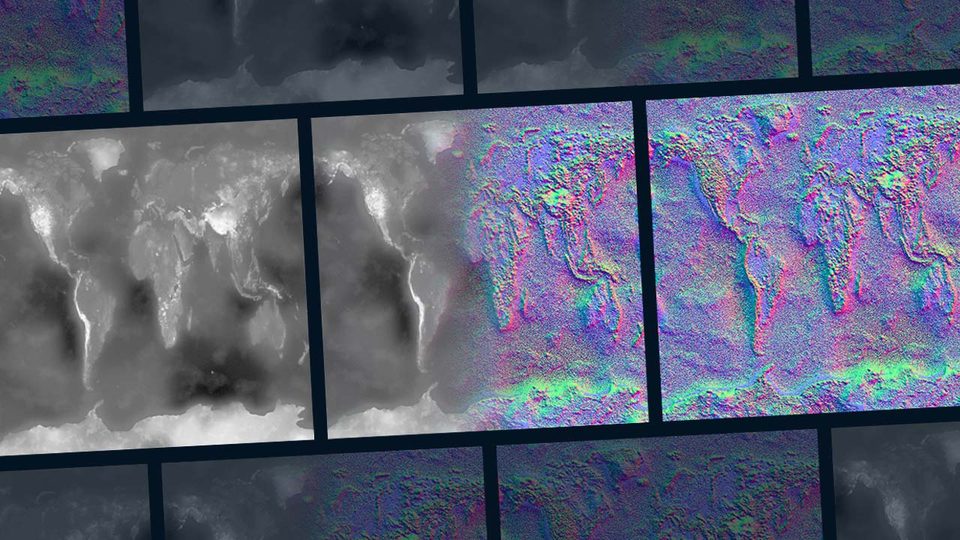
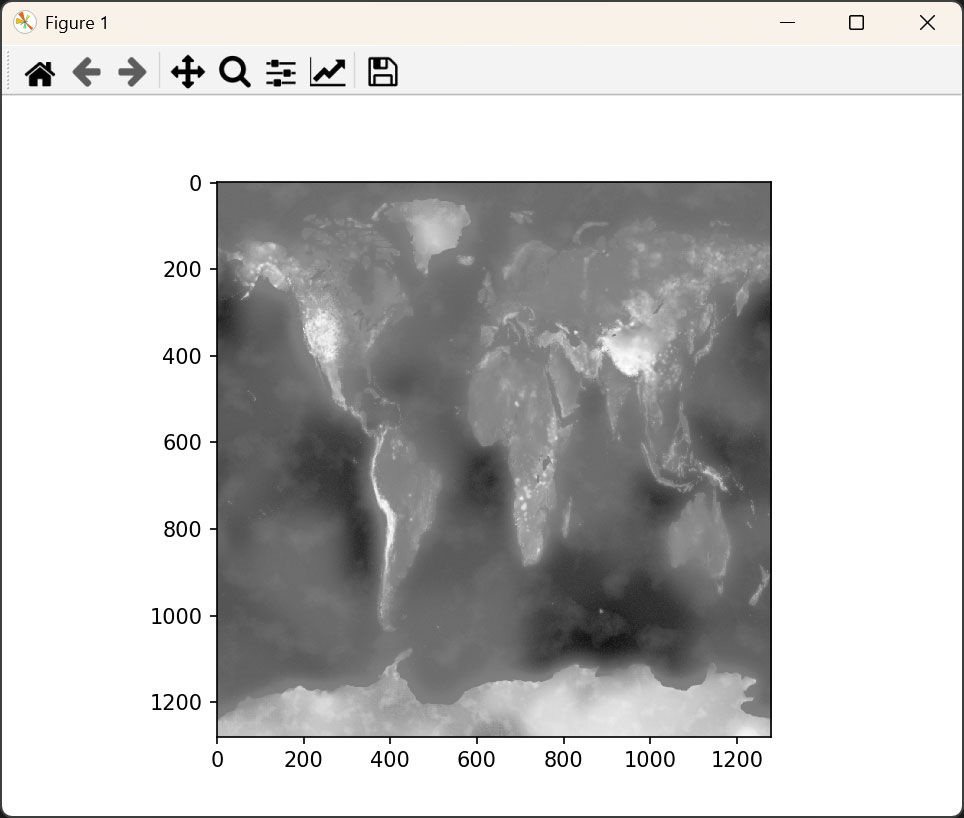 |
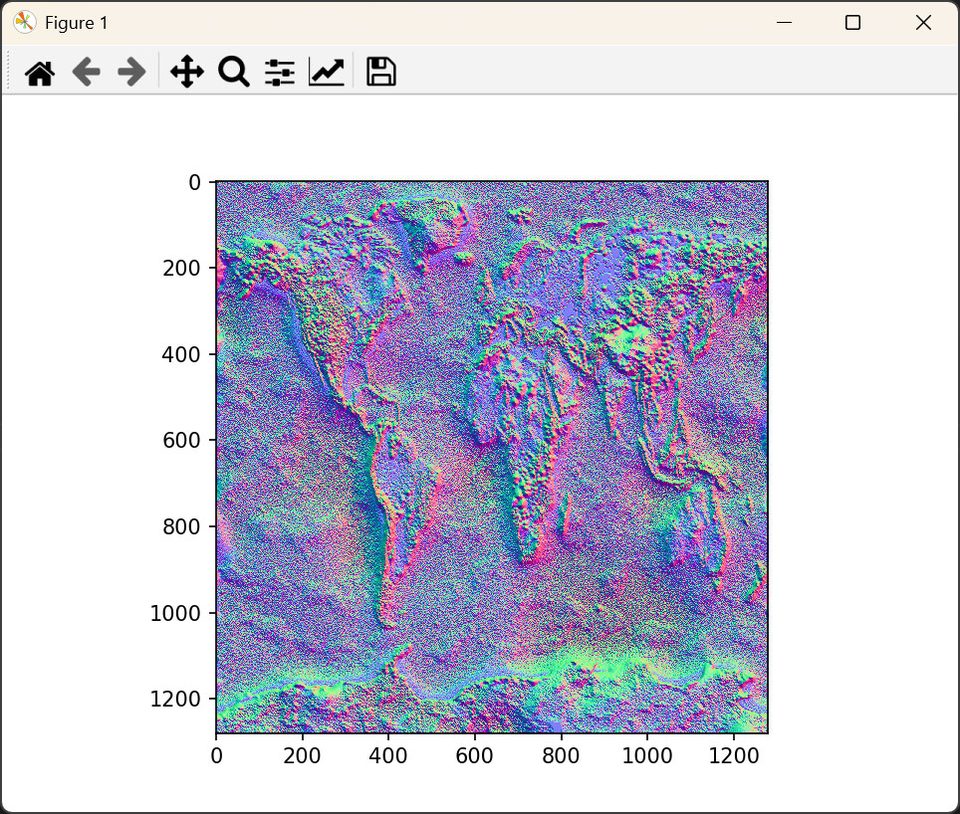 |
| 【左】Height Map | 【右】生成的 Normal Map |
源代码
import os
import numpy as np
import matplotlib.image as mpimg
import matplotlib.pyplot as plt
filename = 'C:/Users/%USER%/Downloads/Approximate_Earth_Heigh_Map.png'
reverse = True # 纹理颜色 G 通道反转 OpenGL or DirectX
img = mpimg.imread(filename, format='png')
img = img[:,:,:3] # 删除 Alpha 通道
ny, nx, _ = img.shape
dy, dx = np.gradient(img[:,:,0], 2.0/ny, 2.0/nx)
if reverse:
dy *= -1
norm = np.sqrt(dx*dx + dy*dy + 1.0*1.0)
img[:,:,0] = -dx / norm
img[:,:,1] = -dy / norm
img[:,:,2] = 1.0 / norm
img = img * 0.5 + 0.5 # 从 -1~1 转换到 0~1 范围
mpimg.imsave(os.path.splitext(filename)[0] + '_output.png', np.clip(img, 0, 1))
plt.imshow(img, interpolation='nearest')
plt.show()
Normal Map → Height Map
验证使用的 Normal Map:
File:Normal map example - Map.png - Wikimedia Commons
Image by Julian Herzog, licensed under CC BY 4.0
{kind=link}
注意: 创建 Normal Map 时使用的差分法对于创建精确的 Height Map 来说是一个重要因素,但在大多数情况下,我们没有这些详细信息,因此将其作为数值误差忽略。
接下来是从 Normal Map 创建 Height Map 的方法。
将 Height Map 设为 z(x,y),Normal Map 设为范围在 -1 到 1 的三维向量 n(x,y)。
从 Normal Map n(x,y) 还原 x 轴方向的偏微分值 p(x,y) 和 y 轴方向的偏微分值 q(x,y):
$$ p(x,y) = -\frac{n_x}{n_z} \simeq \frac{\partial z}{\partial x}, \quad q(x,y) = -\frac{n_y}{n_z} \simeq \frac{\partial z}{\partial y}. \quad (4) $$
请注意,这里还原的 p(x,y) 和 q(x,y) 与创建 Normal Map 时原始 Height Map 的偏微分值之间,由于纹理压缩等原因会包含误差。
下面以 p(x,y)、q(x,y) 为基础来创建 Height Map。
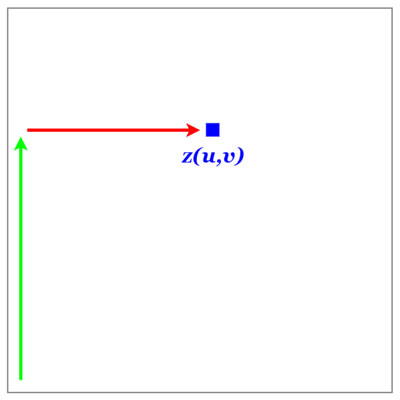
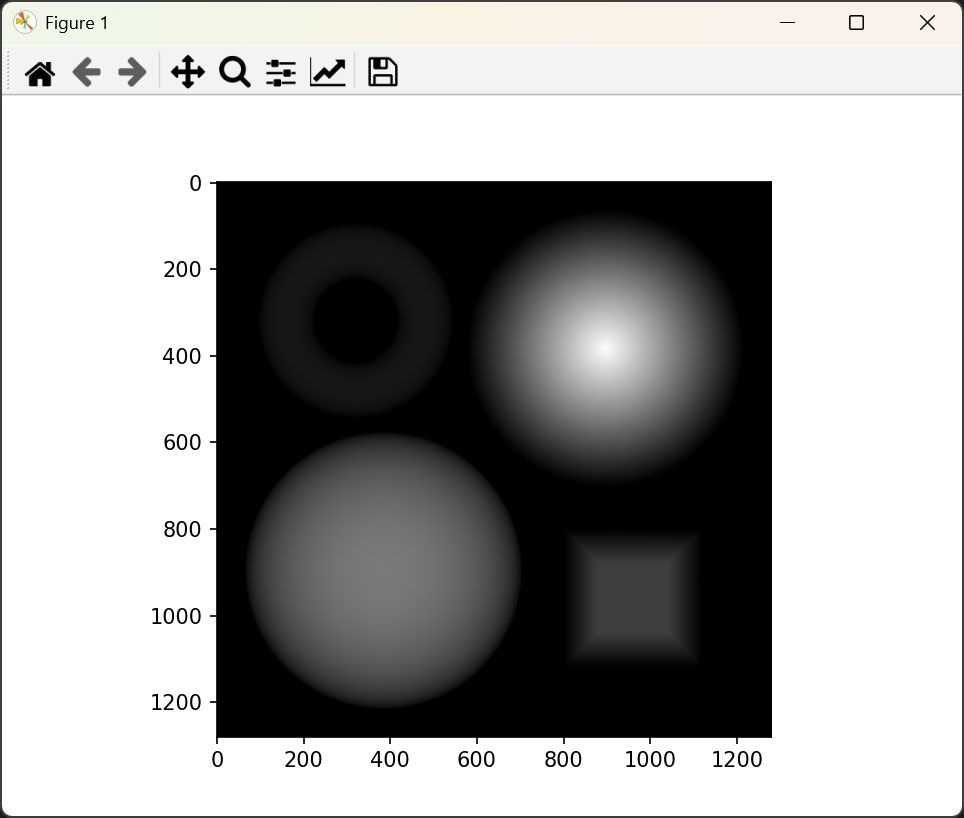
方法一:线积分
最简单的方法是沿各轴进行线积分:
$$ z(u,v) = \int_{0}^{v} q(0,y) \, dy + \int_{0}^{u} p(x,v) \, dx + C. \quad (5) $$
C 是在偏微分过程中消失的积分常数,相当于 Height Map 整体的偏移量。由于此偏移量在本次讨论中不重要,我们将其忽略。
这种方法简单明了、实现也很容易,但缺点是受数值误差影响较大,生成的 Height Map 上会出现条纹状噪声。
 |
 |
| 【左】式 (5) 的计算结果 | 【右】加伽马后可视化噪声的效果 |
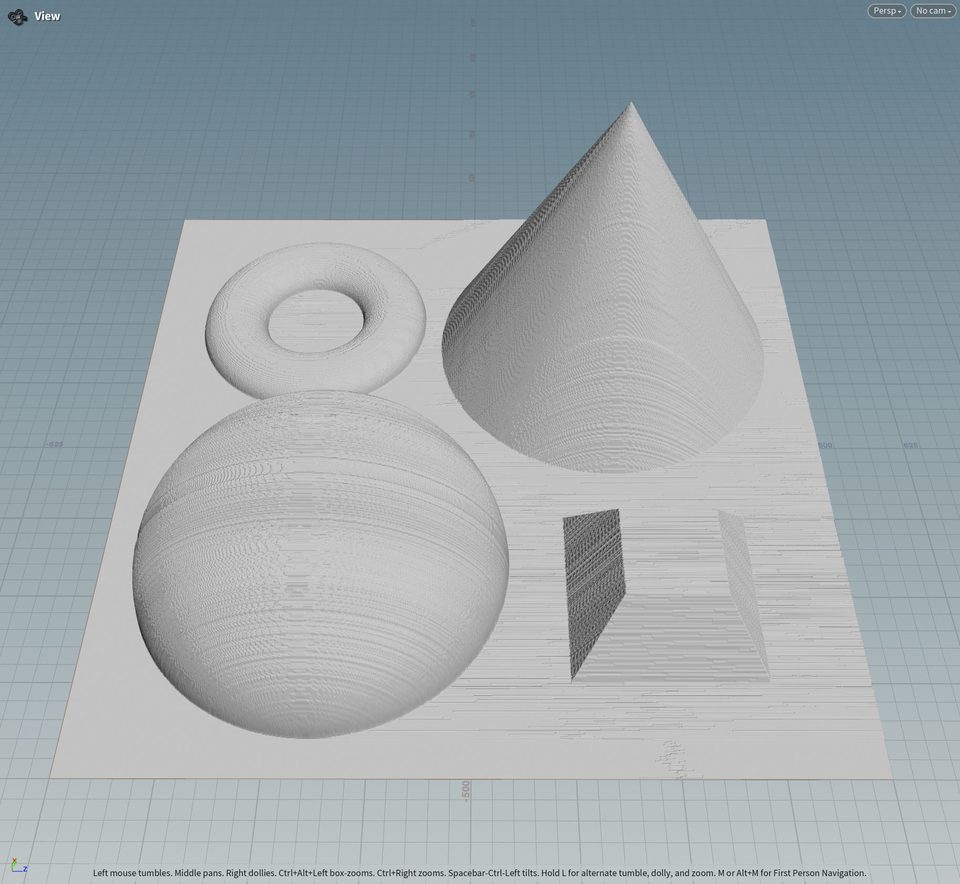
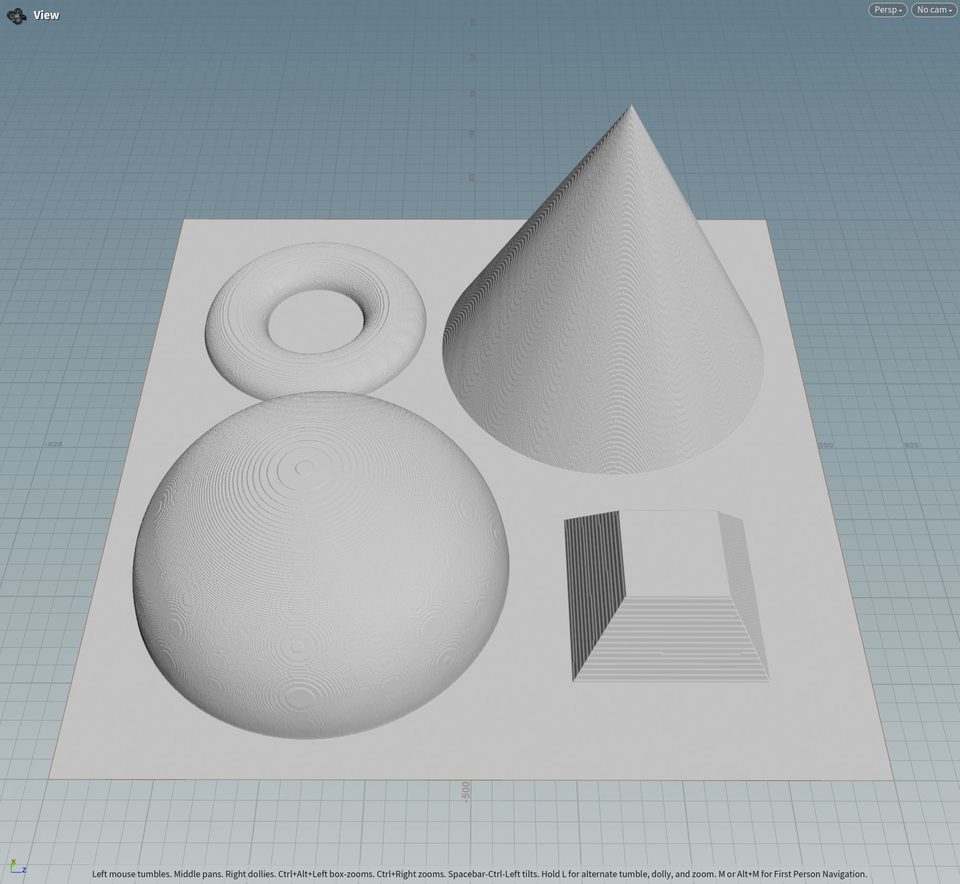
图像 3D 化结果
源代码
import os
import numpy as np
import matplotlib.image as mpimg
import matplotlib.pyplot as plt
filename = 'C:/Users/%USER%/Downloads/Normal_map_example_-_Map.png'
reverse = True # 纹理颜色 G 通道反转 OpenGL or DirectX
img = mpimg.imread(filename, format='png')
img = img[:,:,:3] # 删除 Alpha 通道
img = img * 2.0 - 1.0 # 从 0~1 转换到 -1~1 范围
ny, nx, _ = img.shape
# 式(4)
p = -img[:,:,0] / img[:,:,2]
q = -img[:,:,1] / img[:,:,2]
if reverse:
q *= -1
p *= 2.0 / nx
q *= 2.0 / ny
# 式(5)
C = 0.0
zy = 0.0
for y in range(ny):
zy += q[y,0]
zx = 0.0
for x in range(nx):
zx += p[y,x]
img[y,x,0:3] = zy + zx + C
mpimg.imsave(os.path.splitext(filename)[0] + '_output.png', np.clip(img, 0, 1))
plt.imshow(img, interpolation='nearest')
plt.show()
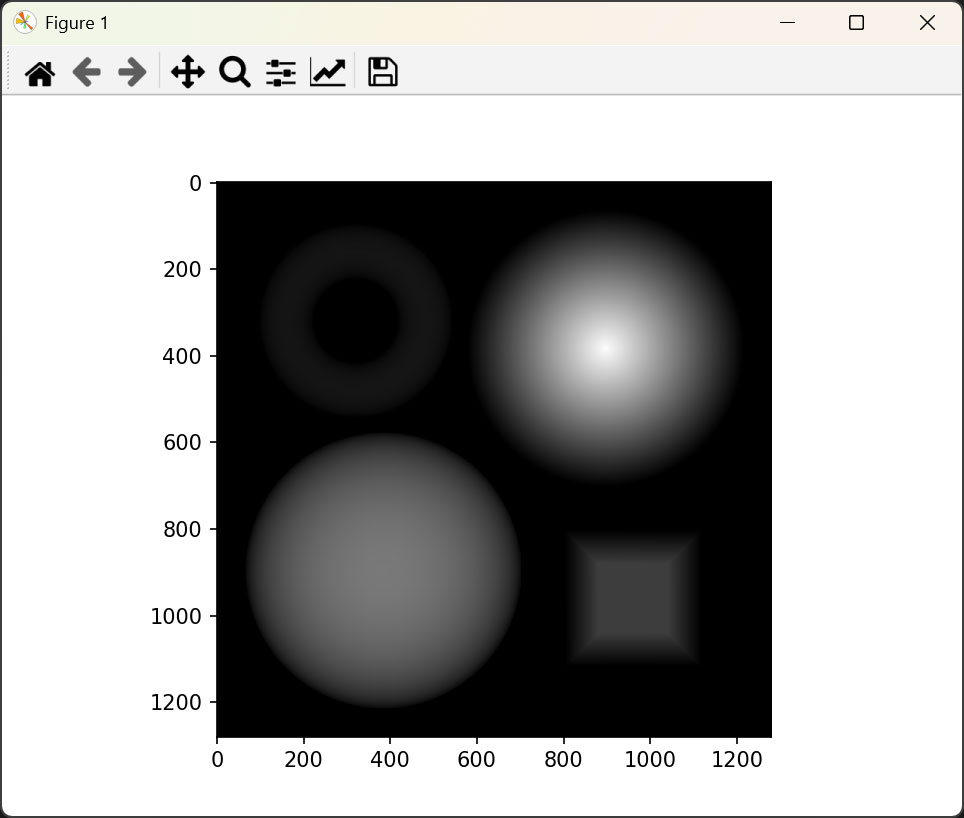
方法二:泊松方程
另一种方法是通过求解泊松方程来获得 Height Map。
定义二维向量场 r 如下:
$$ \textbf{r}(x,y) = (p(x,y), q(x,y)). \quad (6) $$
求解以 r 的散度为右端项的方程,即可创建 Height Map:
$$ \Delta z = -(\text{div} \; \textbf{r}). \quad (7) $$
该泊松方程可以通过多种方法求解。
关于泊松方程解法的示例,详见「在 Houdini 中玩泊松」一文。
本文使用 SciPy 的稀疏矩阵直接法进行求解。
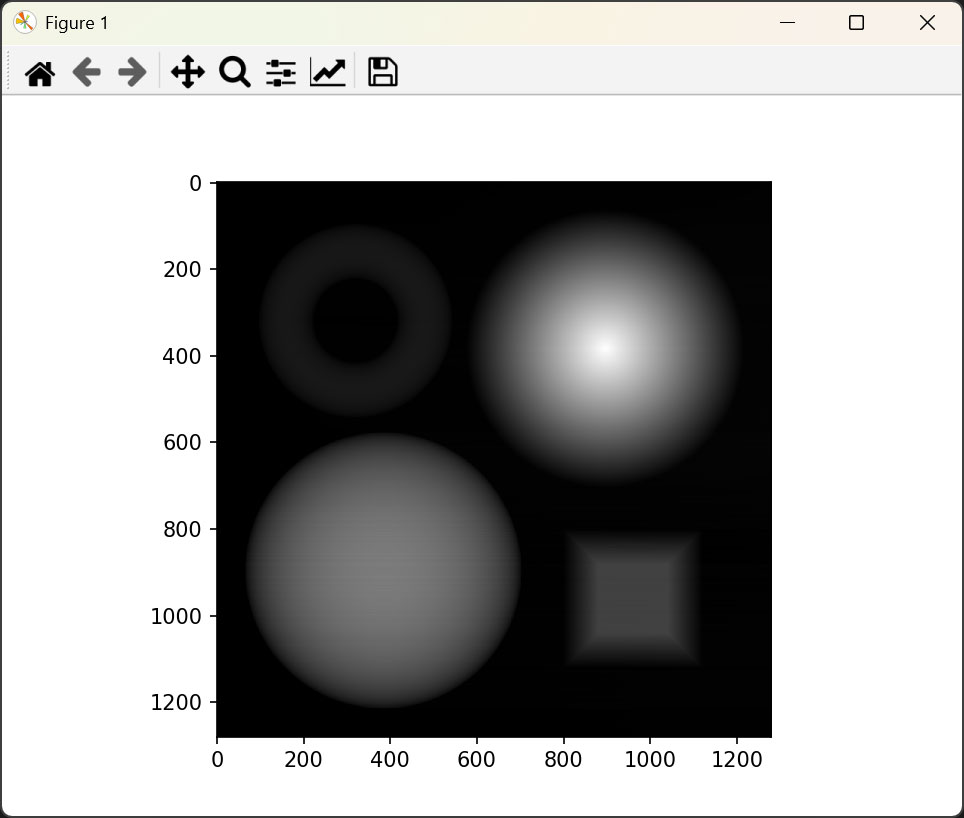
式 (7) 的计算结果
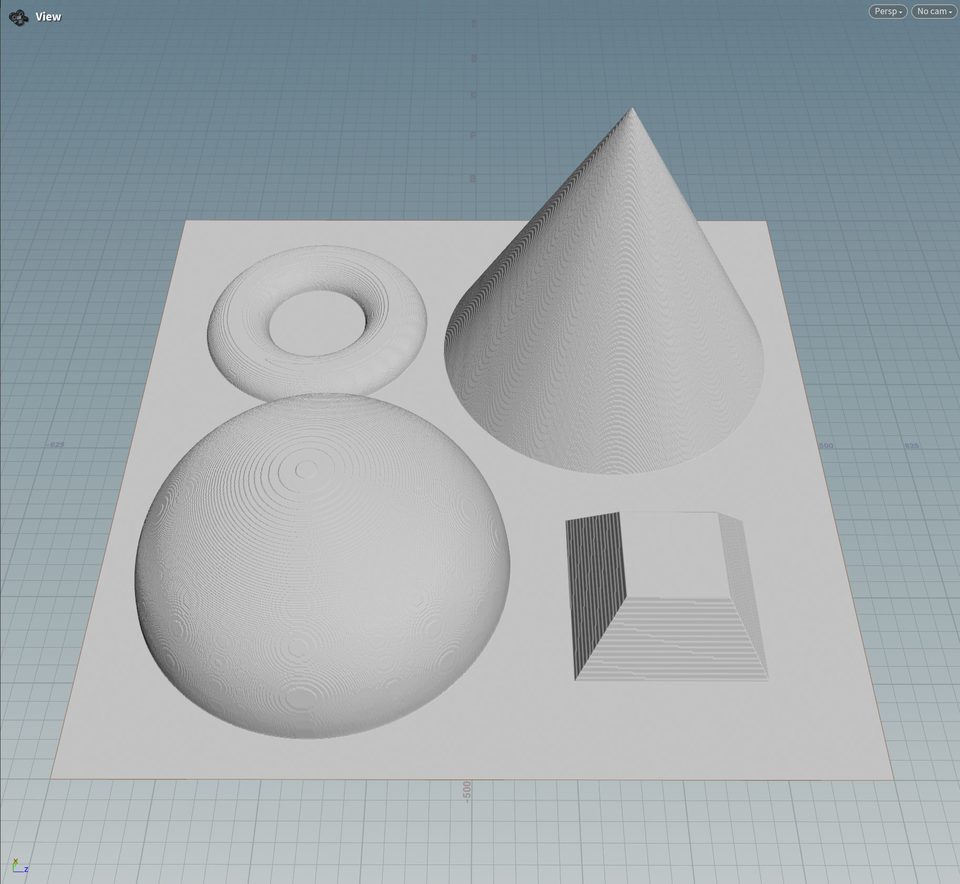
图像 3D 化结果
源代码
import os
import numpy as np
import matplotlib.image as mpimg
import matplotlib.pyplot as plt
from scipy.sparse import diags, kronsum
from scipy.sparse.linalg import spsolve
filename = 'C:/Users/%USER%/Downloads/Normal_map_example_-_Map.png'
reverse = True # 纹理颜色 G 通道反转 OpenGL or DirectX
img = mpimg.imread(filename, format='png')
img = img[:,:,:3] # 删除 Alpha 通道
img = img * 2.0 - 1.0 # 从 0~1 转换到 -1~1 范围
ny, nx, _ = img.shape
# 式(4)
p = -img[:,:,0] / img[:,:,2]
q = -img[:,:,1] / img[:,:,2]
if reverse:
q *= -1
p *= 2.0 / nx
q *= 2.0 / ny
# 式(7)
# 诺伊曼边界条件的二维拉普拉斯算子
tx = diags([-1.0, 2.0, -1.0], [-1, 0, 1], shape=(nx, nx), format='lil')
ty = diags([-1.0, 2.0, -1.0], [-1, 0, 1], shape=(ny, ny), format='lil')
tx[0,0] = tx[-1,-1] = 1.0
ty[0,0] = ty[-1,-1] = 1.0
A = kronsum(tx.tocsr(), ty.tocsr(), format='csr')
# -(div r)
divr = -(np.gradient(p, axis=1) + np.gradient(q, axis=0))
divr = divr.reshape(-1)
# 为使解唯一,在边界上的一点施加狄利克雷条件
A = A.tolil()
A[0,:] = 0.0
A[0,0] = 1.0
A = A.tocsr()
divr[0] = 0.0 # Height Map 整体的偏移量
# 求解泊松方程
z = spsolve(A, divr).reshape(ny, nx)
img[:,:,0] = z
img[:,:,1] = img[:,:,0]
img[:,:,2] = img[:,:,0]
mpimg.imsave(os.path.splitext(filename)[0] + '_output.png', np.clip(img, 0, 1))
plt.imshow(img, interpolation='nearest')
plt.show()
方法三:最小化问题
最后介绍通过求解最小化问题来获得 Height Map 的方法。
求使以下目标函数 W 最小化的 z:
$$ W = \iint_{\Omega} \left( \left|\frac{\partial z}{\partial x} - p\right|^{2} + \left|\frac{\partial z}{\partial y} - q\right|^{2} \right) dx \, dy. \quad (8) $$
为求解上述方程,使用傅里叶变换。
二维傅里叶变换的定义如下(j 为虚数单位):
$$ \hat{z}(u,v) = \iint_{\Omega} z(x,y) e^{-j(ux + vy)} \, dx \, dy \quad (9) $$
二维逆傅里叶变换的定义如下:
$$ z(x,y) = \frac{1}{2\pi} \iint_{\Omega} \hat{z}(u,v) e^{j(ux + vy)} \, du \, dv \quad (10) $$
傅里叶变换的导数性质如下:
$$ \mathscr{F}\left[\frac{\partial}{\partial x} z(x,y)\right] = ju \; \mathscr{F}[z(x,y)], \quad \mathscr{F}\left[\frac{\partial}{\partial y} z(x,y)\right] = jv \; \mathscr{F}[z(x,y)]. \quad (11) $$
由帕塞瓦尔定理,以下等式成立:
$$ \iint_{\Omega} |z(x,y)|^{2} \, dx \, dy = \frac{1}{2\pi} \iint_{\Omega} |\hat{z}(u,v)|^{2} \, du \, dv. \quad (12) $$
由式 (8)(11)(12) 得:
$$ \frac{1}{2\pi} \iint_{\Omega} \left( |ju\hat{z}(u,v) - \hat{p}(u,v)|^{2} + |jv\hat{z}(u,v) - \hat{q}(u,v)|^{2} \right) du \, dv \to \text{minimum}. \quad (13) $$
展开上式(其中 * 表示共轭):
$$ \frac{1}{2\pi} \iint_{\Omega} (u^{2}\hat{z}\hat{z}^{*} - ju\hat{z}\hat{p}^{*} + ju\hat{z}^{*}\hat{p} + \hat{p}\hat{p}^{*} + v^{2}\hat{z}\hat{z}^{*} - jv\hat{z}\hat{q}^{*} + jv\hat{z}^{*}\hat{q} + \hat{q}\hat{q}^{*}) \, du \, dv \to \text{minimum}. \quad (14) $$
对上式分别关于 ẑ 和 ẑ* 求导,得到式 (8) 的最小化条件:
$$ (u^{2} + v^{2})\hat{z} + ju\hat{p} + jv\hat{q} = 0, \quad (u^{2} + v^{2})\hat{z}^{*} - ju\hat{p}^{*} - jv\hat{q}^{*} = 0. \quad (15) $$
分别取式 (15) 两式的和与差:
$$ (u^{2}+v^{2})(\hat{z}+\hat{z}^{*}) + ju(\hat{p}-\hat{p}^{*}) + jv(\hat{q}-\hat{q}^{*}) = 0, \quad (16a) $$
$$ (u^{2}+v^{2})(\hat{z}-\hat{z}^{*}) + ju(\hat{p}+\hat{p}^{*}) + jv(\hat{q}+\hat{q}^{*}) = 0. \quad (16b) $$
对 u² + v² ≠ 0 求解上式,得到:
$$ \hat{z}(u,v) = \frac{-ju\hat{p}(u,v) - jv\hat{q}(u,v)}{u^{2} + v^{2}}. \quad (17) $$
u² + v² = 0 对应频率为 0 时的值,相当于图像整体的偏移值。
也就是说,对 p(x,y) 和 q(x,y) 进行傅里叶变换,代入式 (17) 求解,再进行逆傅里叶变换,即可创建 Height Map。
当图像不具有周期性时,通过零填充(zero-padding)可以创建更精确的 Height Map。
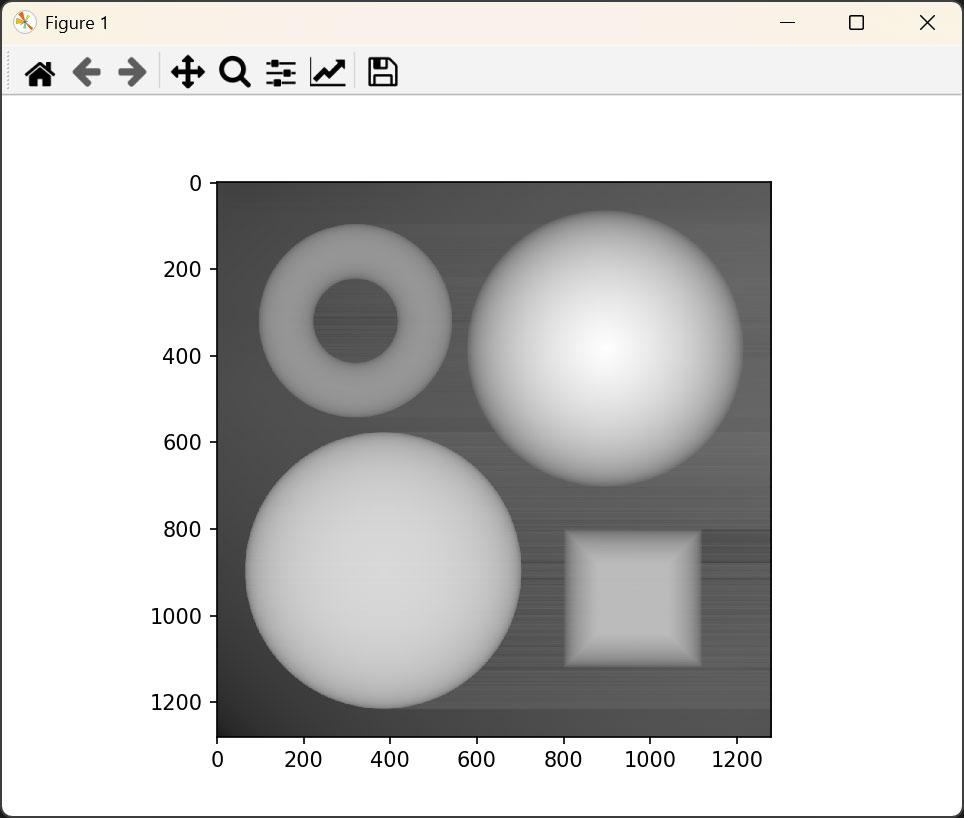
最小化问题的计算结果
图像 3D 化结果
源代码
import os
import numpy as np
import matplotlib.image as mpimg
import matplotlib.pyplot as plt
filename = 'C:/Users/%USER%/Downloads/Normal_map_example_-_Map.png'
reverse = True # 纹理颜色 G 通道反转 OpenGL or DirectX
zeropadding = 3 # 零填充的图像尺寸倍数 为 1 时不进行零填充
zeropadding = max(1, zeropadding)
img = mpimg.imread(filename, format='png')
img = img[:,:,:3] # 删除 Alpha 通道
img = img * 2.0 - 1.0 # 从 0~1 转换到 -1~1 范围
ny, nx, _ = img.shape
# 式(4)
p = -img[:,:,0] / img[:,:,2]
q = -img[:,:,1] / img[:,:,2]
if reverse:
q *= -1
p *= 2.0 / nx
q *= 2.0 / ny
# 零填充
if zeropadding >= 2:
pady = ny * (zeropadding - 1)
padx = nx * (zeropadding - 1)
p = np.pad(p, ((0, pady), (0, padx)), mode='constant')
q = np.pad(q, ((0, pady), (0, padx)), mode='constant')
# 定义 u, v
u = (2.0 * np.pi * np.fft.fftfreq(nx * zeropadding)).reshape(1, nx * zeropadding)
v = (2.0 * np.pi * np.fft.fftfreq(ny * zeropadding)).reshape(ny * zeropadding, 1)
# 正向二维快速傅里叶变换
P = np.fft.fft2(p)
Q = np.fft.fft2(q)
# 式(17)
denom = u*u + v*v
mask = denom <= 1e-12
denom[mask] = 1.0 # 避免除以零
Z = ( u * P.imag + v * Q.imag) / denom \
+ (-u * P.real - v * Q.real) / denom * 1.0j
Z[mask] = 0.0 + 0.0j
# 逆向二维快速傅里叶变换
z = np.fft.ifft2(Z)
img[:,:,0] = z.real[:ny,:nx]
img[:,:,1] = img[:,:,0]
img[:,:,2] = img[:,:,0]
mpimg.imsave(os.path.splitext(filename)[0] + '_output.png', np.clip(img, 0, 1))
plt.imshow(img, interpolation='nearest')
plt.show()
总结
本文解说了 Height Map 与 Normal Map 相互转换的几种方法。希望这篇文章能帮助大家更深入地理解 Height Map 和 Normal Map。
参考文献
- Tiangong Wei and Reinhard Klette "Height from Gradient Using Surface Curvature and Area Constraints", 2002
- Reinhard Klette, Karsten Schluns, "Height data from gradient fields", Jan 1996
- Rafael Saracchini et al., "A robust multi-scale integration method to obtain the depth from gradient maps", Aug 2012
作者简介
廣瀬 — 从影像行业转入 Monolith Soft。此后作为技术美术(TA)主要负责特效相关业务。喜欢的食物是软冰淇淋。
📝 译者延伸讨论
以下内容为译者(非凡像素)在阅读本文后与 AI 进行的延伸讨论整理,非原文内容。
一、为什么不直接用 Substance Designer 来做转换?
这篇文章用 Python + NumPy/SciPy 手写转换,而非使用 Substance Designer 内置的节点,原因有三:
1. SD 的转换是「黑盒」,本文的目的是理解原理
SD 的 Normal 节点一键就能转,但你不会知道它内部到底用的是哪种算法、有什么局限性。作者的目标是用数学推导让读者真正理解背后的原理。
2. Normal Map → Height Map 是一个病态逆问题
- Height → Normal 很简单:偏微分 + 外积 + 归一化,SD 可以完美处理
- Normal → Height 则是数学上的难题(从导数还原原函数)。SD 内置的 Normal to Height 节点效果往往不够理想,尤其是对复杂法线图。作者给出的泊松方程和 FFT 方法精度更高、可定制性更强。
3. TA 的工作需要可编程、可批量化的管线工具
Python 脚本可以批量处理大量贴图、集成到 CI/CD 或资产管线中、针对特定项目需求调参——这些都是 SD 作为交互式工具难以胜任的。
二、这些技术在哪里会用到?
Normal Map → Height Map(逆向还原)
| 场景 | 说明 |
|---|---|
| 从扫描/照片测量数据恢复高度信息 | 照片测量法有时只能提取到法线信息,需要反推高度图 |
| 遗留资产修复 | 老项目只留下了 Normal Map,原始 Height Map 丢失 |
| PBR 材质的 Parallax Occlusion Mapping (POM) | POM 需要 Height Map,但手头只有 Normal Map |
| 地形生成 | 从法线图反推地形高度数据 |
| Decal 系统 | 贴花系统需要从法线反推高度来做正确的混合 |
Height Map → Normal Map(正向生成)
| 场景 | 说明 |
|---|---|
| 程序化纹理管线 | Houdini/Python 程序化生成的高度图需要自动计算法线图 |
| 地形渲染 | 开放世界游戏运行时需要从高度图计算法线 |
| 雕刻细节烘焙 | ZBrush 雕刻导出的高度图转法线图用于游戏内低模 |
三、流体/粒子模拟中的高度场→法线→实时光照
这是一条从物理模拟到视觉呈现的渲染管线:
- 流体模拟产生高度场:流体模拟(SPH、浅水方程等)计算出每一帧水面每个点的高度值,排列成 2D 网格就是高度场
- 高度场转法线图:高度场只告诉你「这里有多高」,但光照计算需要知道「表面朝哪个方向」。通过对高度场求偏导数得到法线
- 必须实时完成:水面每帧都在变化,法线图也必须每帧重新计算。这个转换在 GPU Shader 中实时完成:
// GPU Compute Shader 中实时计算水面法线
float h_left = heightMap.Sample(uv + float2(-texelSize, 0));
float h_right = heightMap.Sample(uv + float2( texelSize, 0));
float h_up = heightMap.Sample(uv + float2(0, texelSize));
float h_down = heightMap.Sample(uv + float2(0, -texelSize));
float3 normal = normalize(float3(h_left - h_right, h_down - h_up, 2.0));
四、UE 中的封装 vs 自研引擎
如果使用 Unreal Engine,这些功能大部分已经封装好了:
- Landscape 系统:自动计算地形法线
- Material Editor:
Normal From HeightMap节点 - 水体插件 (Water Plugin):Gerstner 波的 Height→Normal 全在 Shader 里完成
- Niagara Fluids:流体模拟到渲染的完整管线
Monolith Soft 的 TA 之所以要自己写这些底层工具,正是因为他们使用自研引擎。自研引擎没有 UE 那样完善的可视化工具链,TA 需要直接写代码实现。这也是自研引擎团队 TA 的核心价值——不只是「连节点」,而是要理解底层数学并实现它。
考虑到 Monolith Soft 开发异度神剑系列这种开放世界大作,最可能的应用场景是大规模地形管线和特效系统中的实时光照计算。